
3D Mapping Structure Prototype
Ce prototype est composé de plusieurs capteurs électroniques permettant ainsi de cartographier un environnement 3D à partir de leurs retours et ainsi obtenir un nuage de point 3D associé après un traitement logiciel.
La structure comprend
Un mât et différentes fixations
Deux boîtiers étanches de même taille
Une batterie au plomb 12V 7Ah de la marque RS PRO
Un lidar 3D et son boitier de communication : RS-LiDAR16 de la marque RoboSense
Une unité de mesure matricielle (IMU) et son adaptateur : LPMS-U2 de la marque Lpms
Un récepteur GNSS et son antenne : EVK-7P de la marque uBlox
Une Jetson Nano développer kit de la marque Nvidia
Une platine d’essai où est soudé le circuit électronique
Deux boîtiers étanches de même taille
Une batterie au plomb 12V 7Ah de la marque RS PRO
Un lidar 3D et son boitier de communication : RS-LiDAR16 de la marque RoboSense
Une unité de mesure matricielle (IMU) et son adaptateur : LPMS-U2 de la marque Lpms
Un récepteur GNSS et son antenne : EVK-7P de la marque uBlox
Une Jetson Nano développer kit de la marque Nvidia
Une platine d’essai où est soudé le circuit électronique
Software
Ubuntu 18.04 Jetpack est flashé sur une carte micro-SD de 32Go insérée dans la Jetson
Fonctionnalités
Exécution de noeuds ROS, de scripts python et shell
Enregistrement de l’ensemble des topics des capteurs écoutés dans un bag nommé à la date et heure du début de l’enregistrement. Ce bag est enregistré dans un dossier /bag.
Arrêt de l’enregistrement de données
Téléchargement de bag depuis l’interface
Suppression de bag sur la carte micro-SD
Enregistrement de l’ensemble des topics des capteurs écoutés dans un bag nommé à la date et heure du début de l’enregistrement. Ce bag est enregistré dans un dossier /bag.
Arrêt de l’enregistrement de données
Téléchargement de bag depuis l’interface
Suppression de bag sur la carte micro-SD
Feedback
Ce prototype est la première version du produit et il est fonctionnel.
On peut imaginer de nombreuses améliorations à partir de cette première version.
Il s'agit d'une Proof of Concept (PoC) pour vérifier sa désirabilité et s'il répond aux usages des utilisateurs.
Ce prototype est la première version du produit et il est fonctionnel.
On peut imaginer de nombreuses améliorations à partir de cette première version.
Il s'agit d'une Proof of Concept (PoC) pour vérifier sa désirabilité et s'il répond aux usages des utilisateurs.

Structure modulable métallique
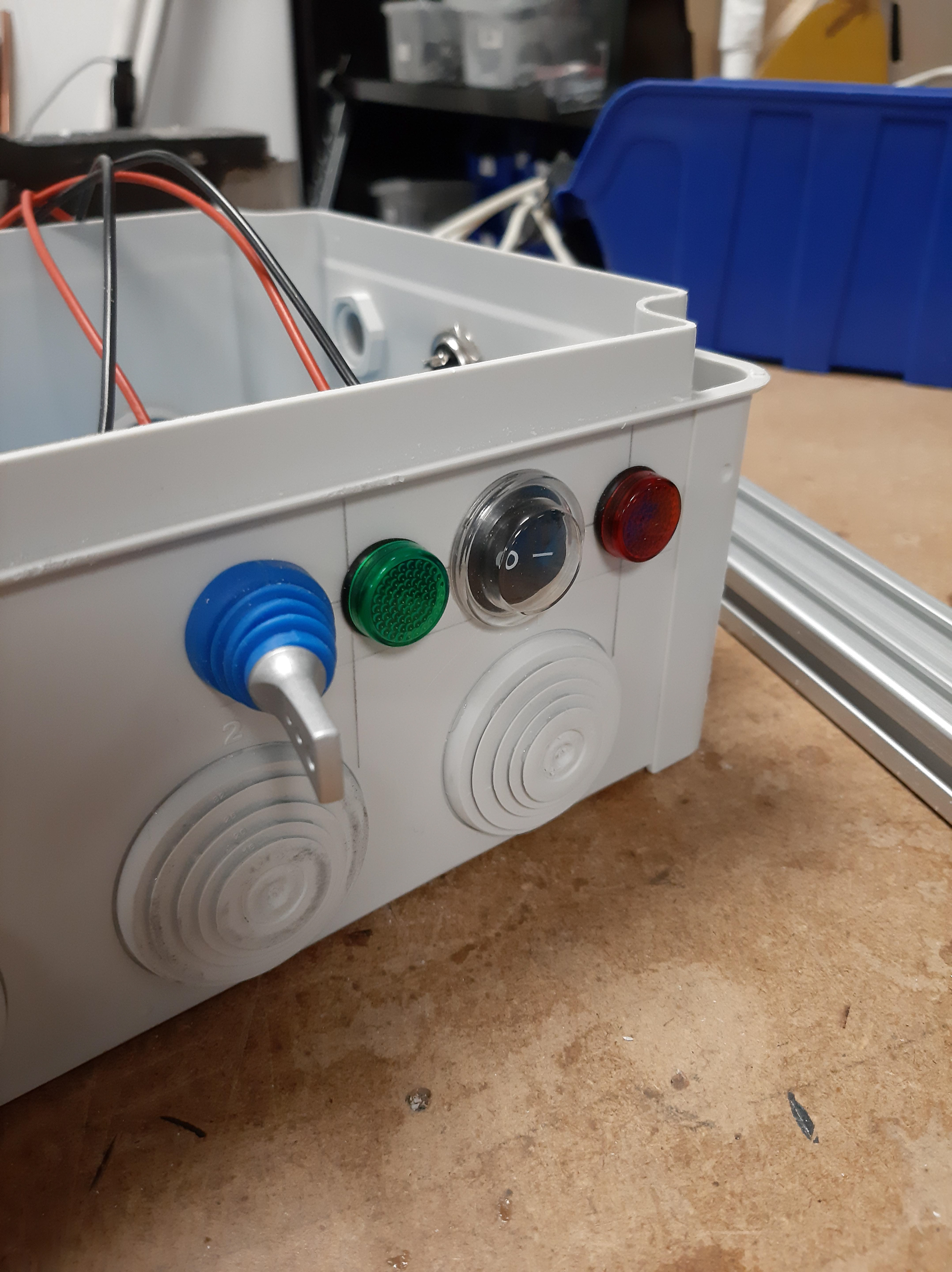
Actionneurs et indicateurs lumineux
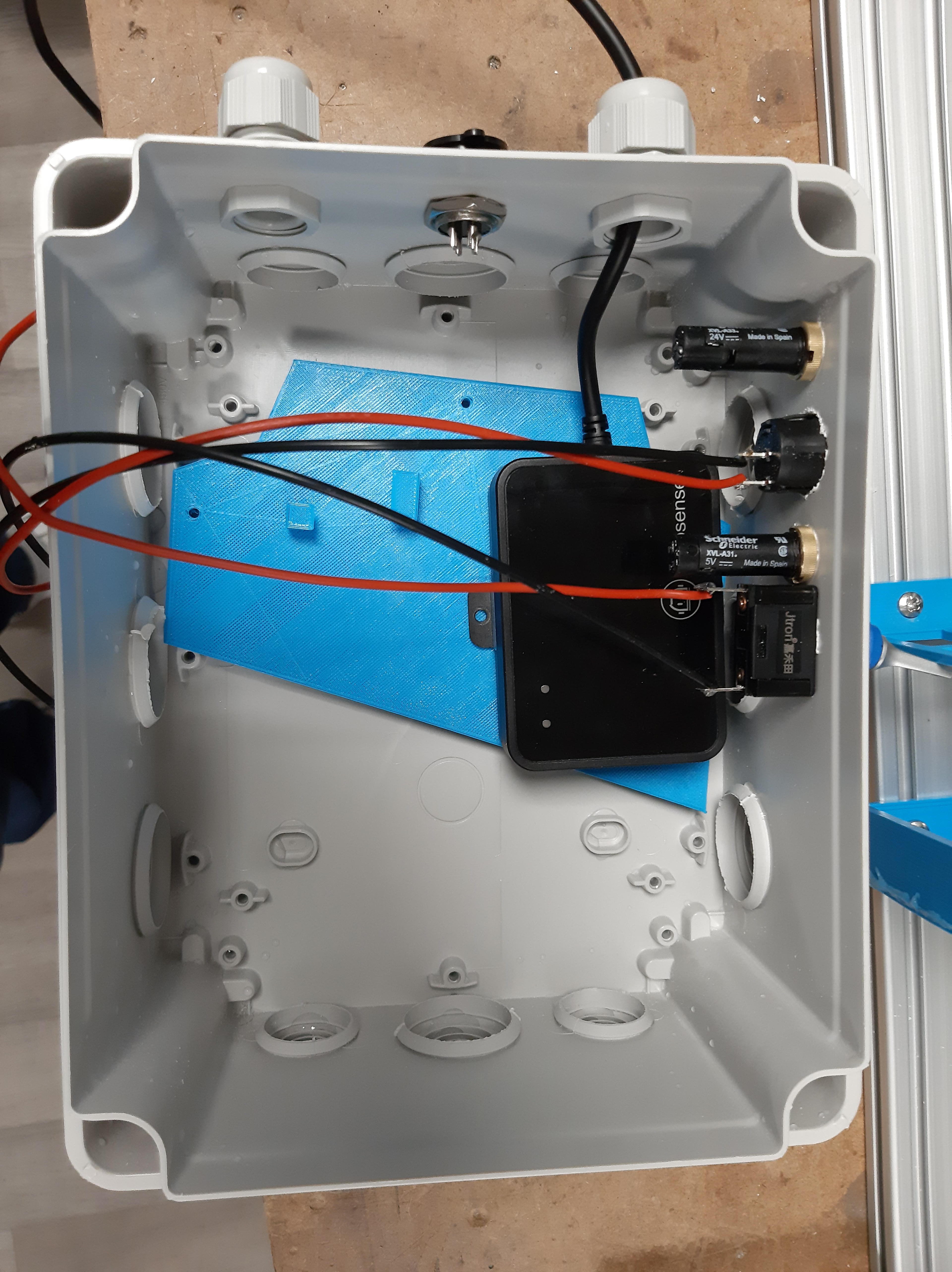
Boitier électronique
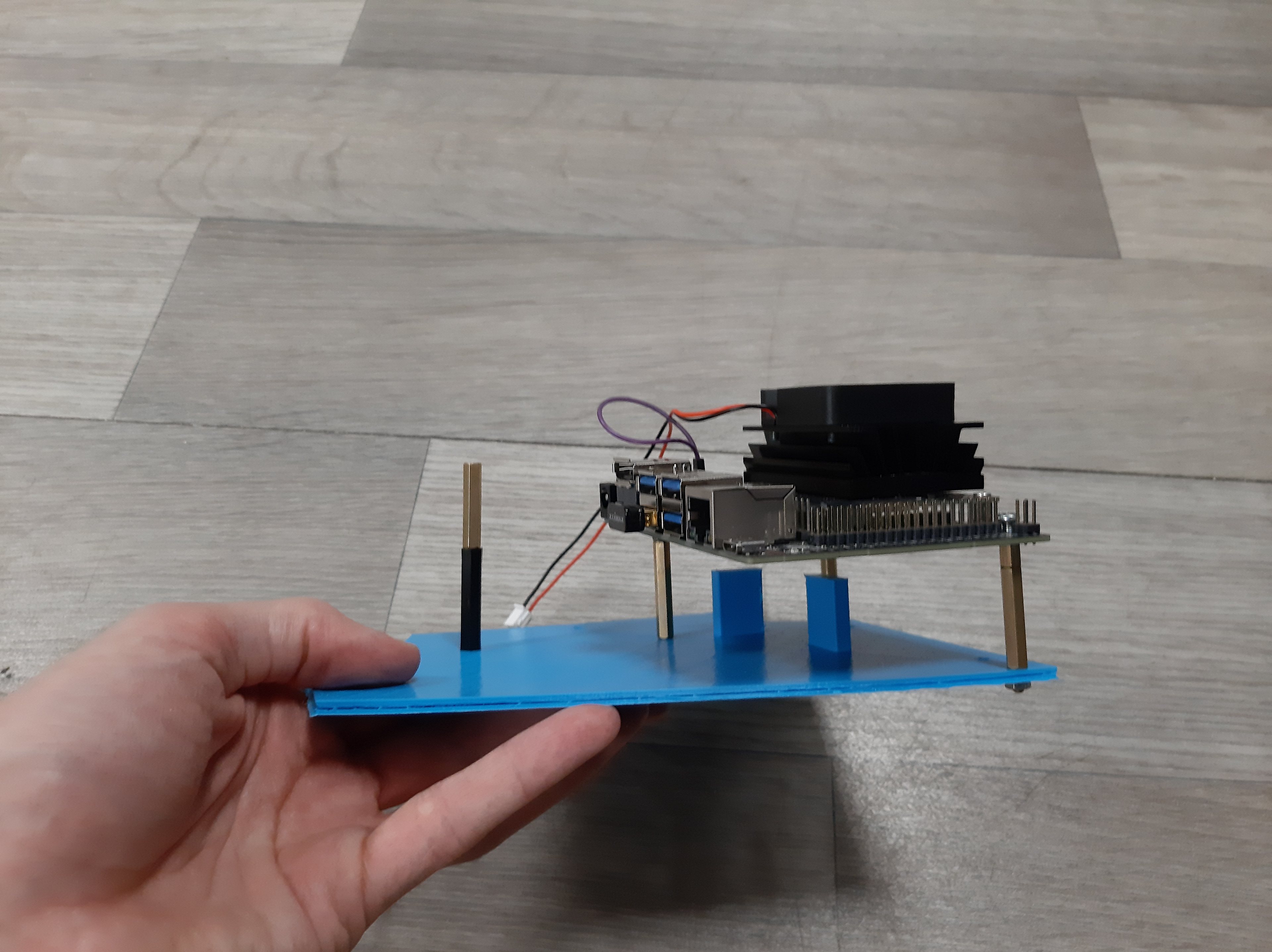
Impression 3D pour aménager le boitier
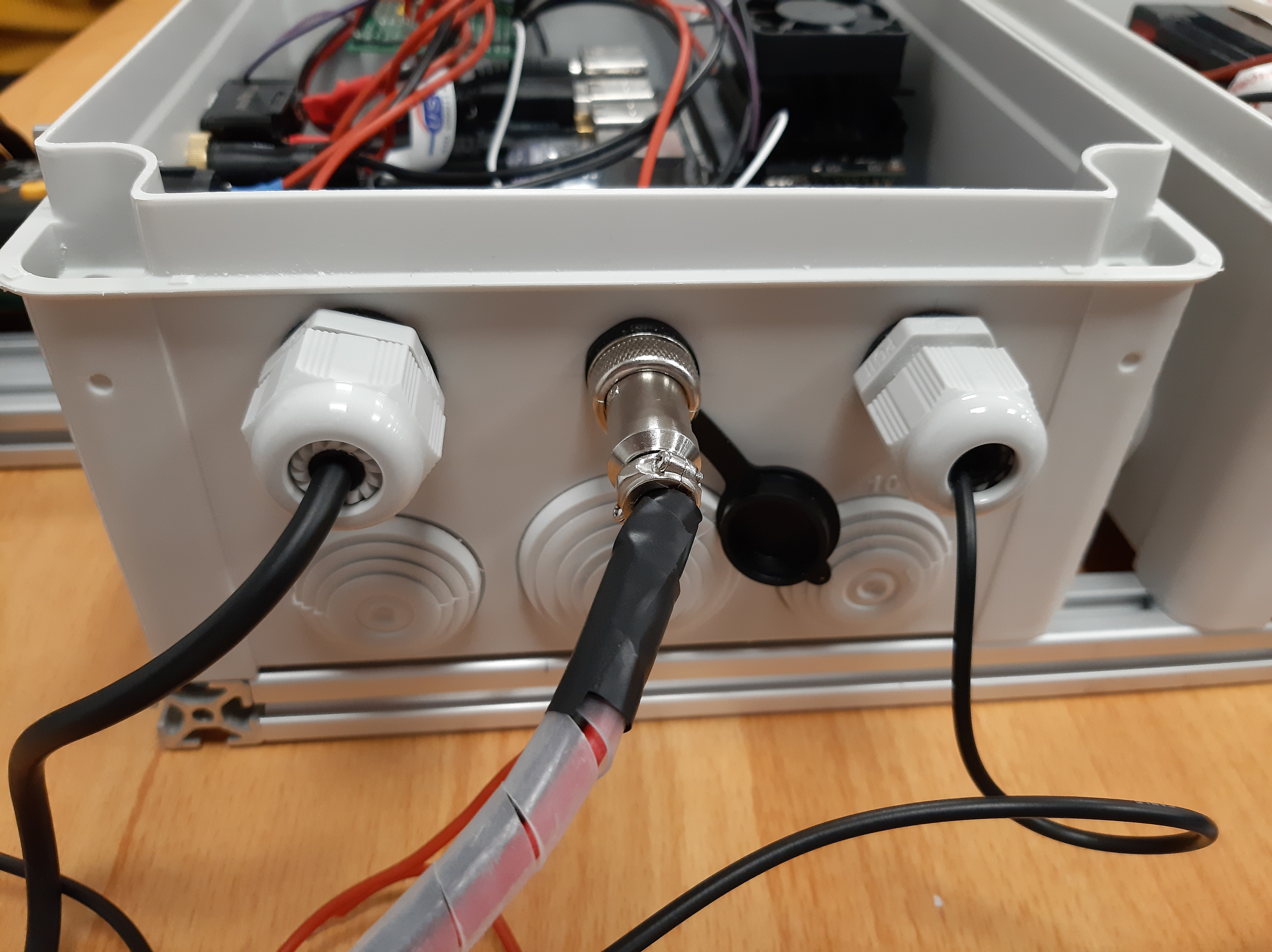
Branchements étanches (norme IP67)
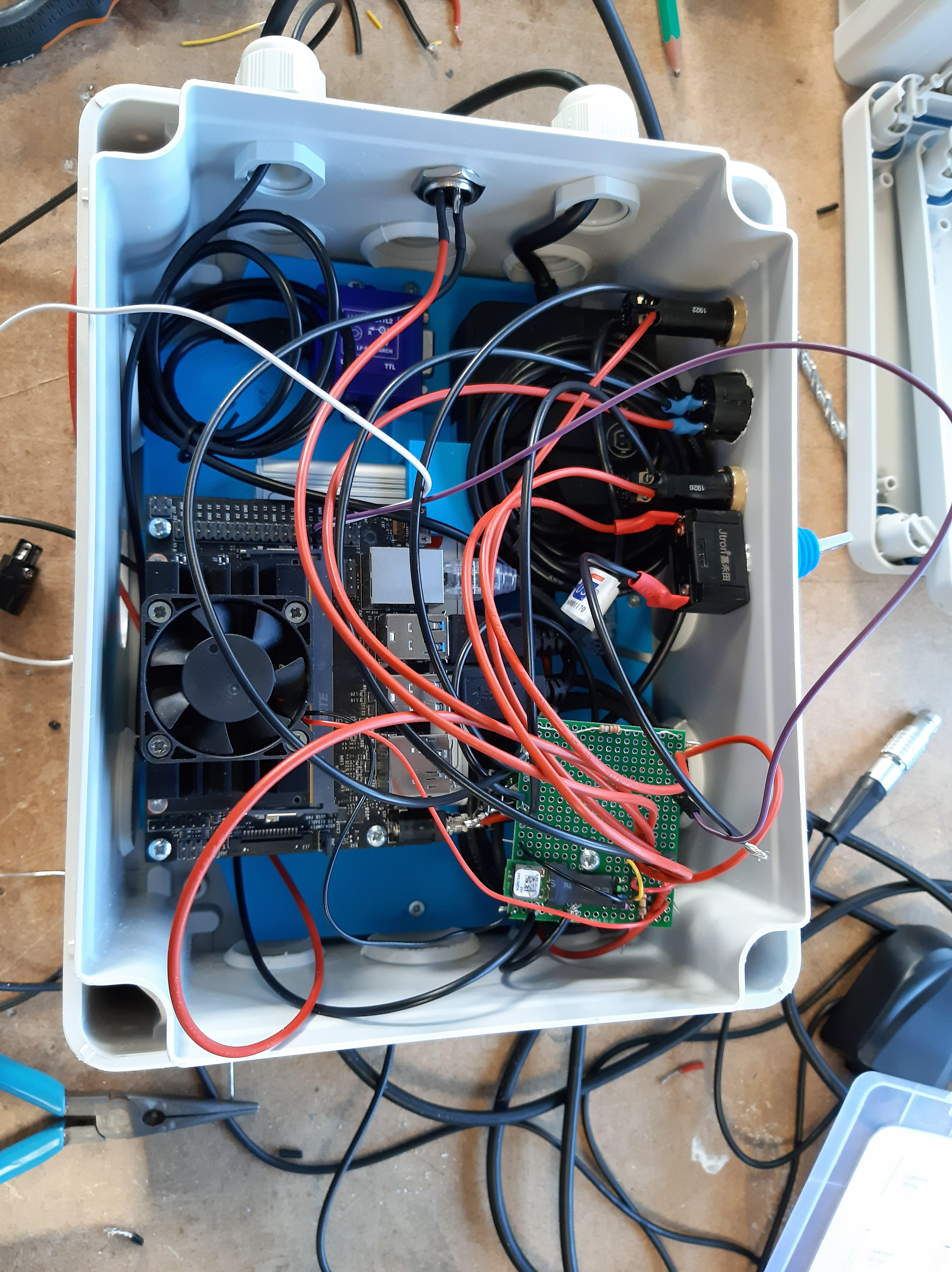
Boitier électronique fini

Boitier puissance
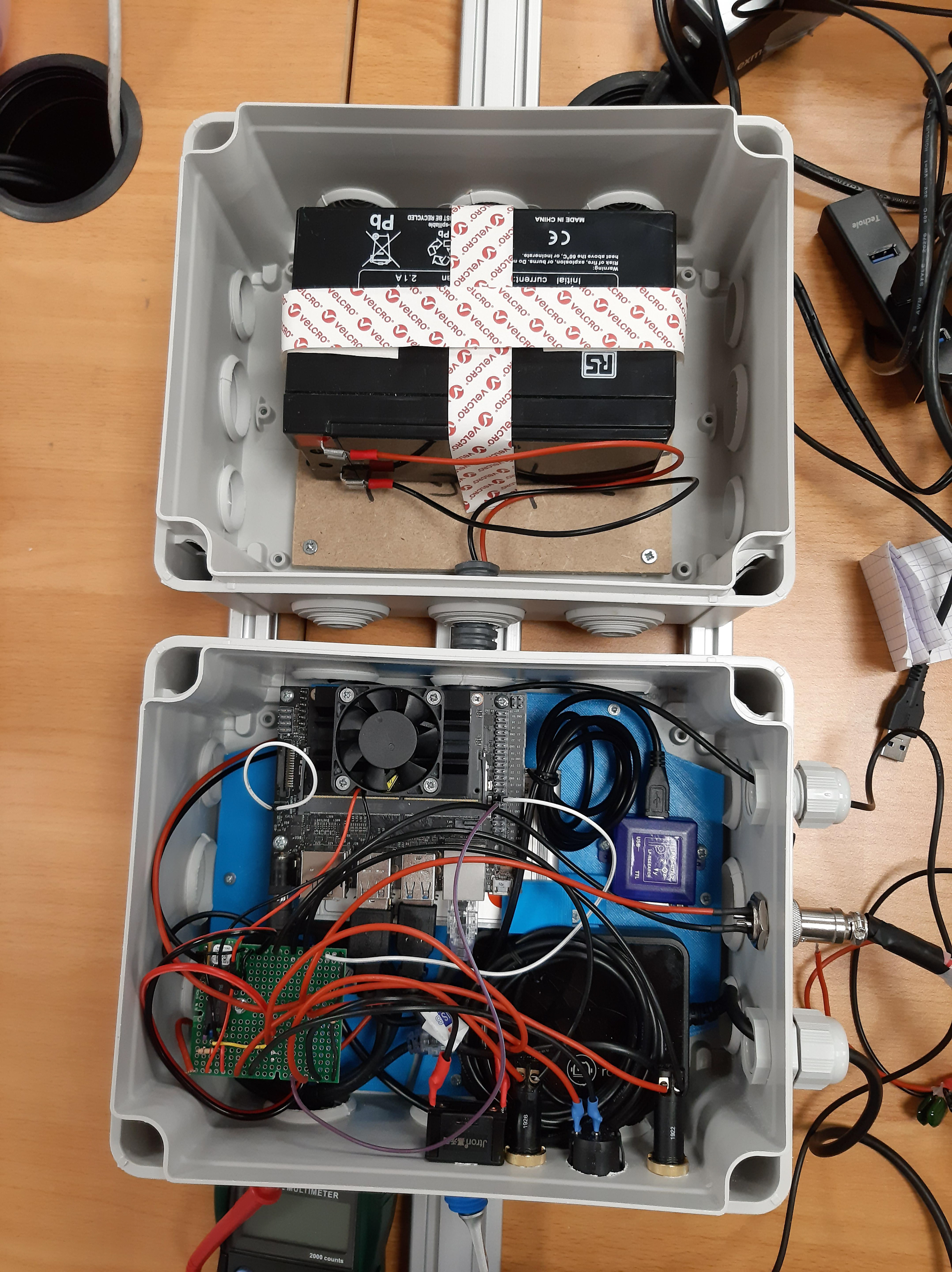
Vue d'ensemble des boitiers
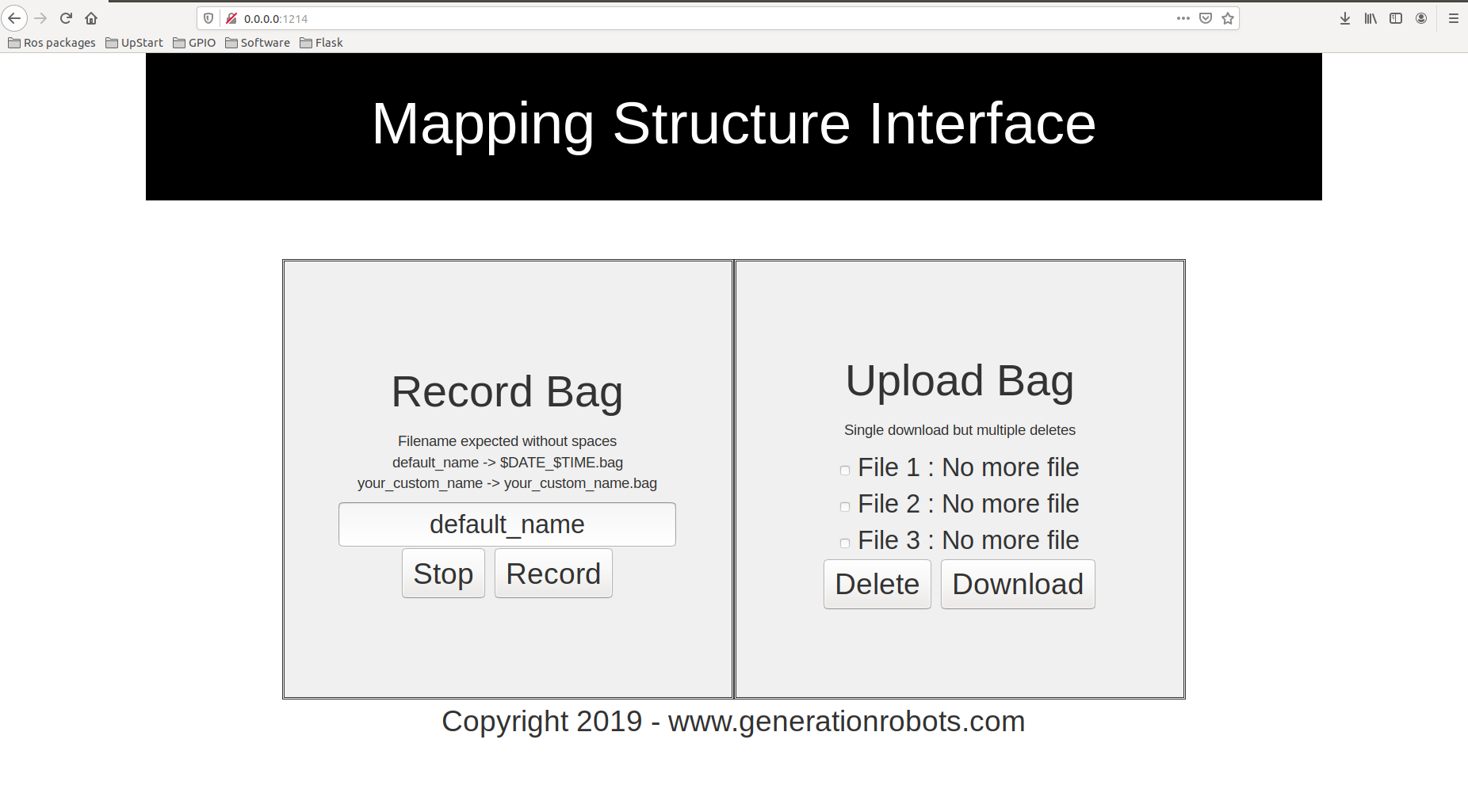
Capture d'écran de l'interface utilisateur
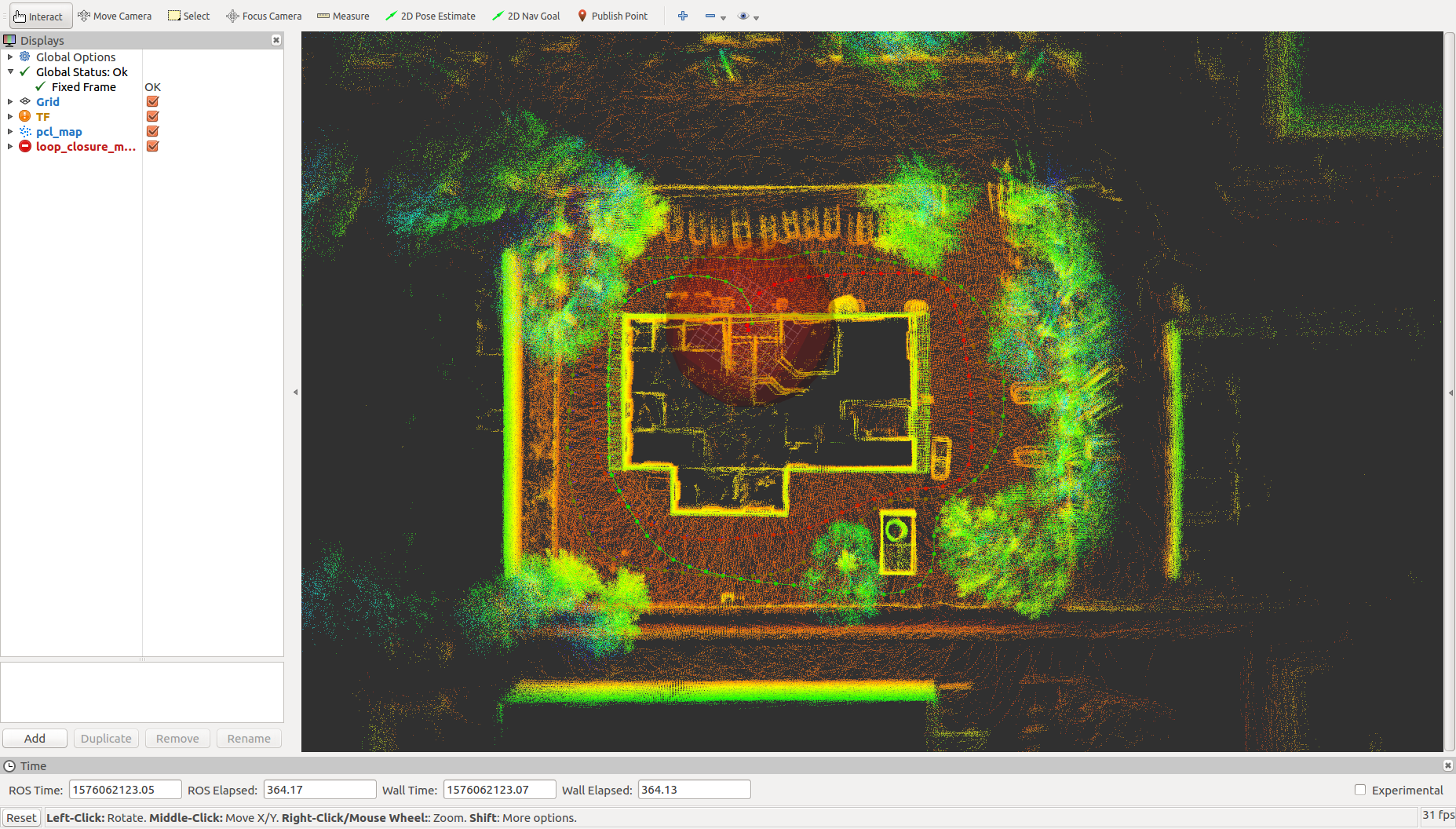
Exemple d'une carte créée à partir du fichier enregistré par la structure.